| Issue |
Mechanics & Industry
Volume 26, 2025
|
|
|---|---|---|
| Article Number | 3 | |
| Number of page(s) | 12 | |
| DOI | https://doi.org/10.1051/meca/2024038 | |
| Published online | 27 January 2025 | |
Original Article
Adaptive backstepping control for electro-hydraulic servo system in extension sleeve press-fitting process of bearing pressing machine
Department of Electromechanical and Automobile, Chizhou Vocational and Technical College, 247100 Chizhou, China
* e-mail: This email address is being protected from spambots. You need JavaScript enabled to view it.
Received:
19
July
2024
Accepted:
19
December
2024
Abstract
In the process of extension sleeve press-fitting of the bearing pressing machine, electro-hydraulic servo system of valve-controlled symmetrical cylinder (ESSVSC) is an important and critical control module, and its performance has a significant impact on the working accuracy of such equipment. People have proposed various related control algorithms. However, external disturbances and unmodeled dynamic factors are often inevitable in practical work and may produce significant influences on the performance of the control system. Existing researches on this issue remains to be enriched and the performance of related algorithms still needs further improvement. An adaptive backstepping control algorithm (ABCA) is proposed in this paper. Firstly, a mathematical model of the ESSVSC is established which takes into account external disturbances and unmodeled dynamic factors. Secondly, the adaptive backstepping controller is designed by using the backstepping algorithm, and the control law and adaptive parameter estimation law are given. The stability of the control system is also proved. The analysis results of the numerical examples show that the proposed algorithm can effectively suppress the adverse effects of typical external disturbances and unmodeled dynamic factors and maintain good control accuracy. The output displacement error of the proposed algorithm is smaller and the tracking performance is better. The control accuracy of our algorithm is improved by 48.33% and 94.76% compared to BSMCA and PID, respectively, which illustrates the rationality of the established mathematical model and the effectiveness of the algorithm. This work is expected to provide useful reference for improving the control performance during the pressing process of the extension cylinder and the algorithm design of ESSVSC.
Key words: Bearing pressing machine / electro-hydraulic servo system / valve-controlled symmetrical cylinder / adaptive backstepping control algorithm (ABCA) / traditional PID control algorithm (PID) / backstepping sliding mode control algorithm (BSMCA)
© H. Chen, Published by EDP Sciences 2025
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
1 Introduction
The pressing process of the bearing pressing machine are mainly composed of three actions, i.e., ejecting cylinder to lift wheel set, sending cylinder to control the V-shaped guide rail over, and extending of the extension sleeve press-fitting cylinder to designated position. The accuracy of the extending and positioning of the extension sleeve press-fitting cylinder directly determines the success rate of the bearing press wheel set. In order to achieve precise control of this critical step, it is necessary to design a suitable control algorithm and a high-quality controller for the electro-hydraulic position servo system [1].
The electro-hydraulic servo system has the characteristics of fast response, high control accuracy and strong load-bearing capacity [2], which are widely used in many important fields such as automotive suspension [3], robots [4–6], rail trains [7] and aircrafts [8]. The electro-hydraulic position servo system of valve-controlled symmetrical cylinder (ESSVSC) is one of the important types. A high-quality controller is crucial for ESSVSC since it directly determines the speed and accuracy of the system's output signal tracking the input signal, hence the actual working conditions of the control system.
Many scholars have proposed different mathematical models and control algorithms of ESSVSC, such as linear model backstepping control [9–12], self-disturbance rejection control [13–16], adaptive control [17,18] and nonlinear model adaptive control [19–21], adaptive fuzzy control [22–26], fractional order adaptive sliding mode control [27–31]. For example, Li et al. [11] and Min et al. [12] both designed a sliding mode control method based on feedback linearization. Although the external disturbances and unmodeled dynamics of the electro-hydraulic position servo system were considered in their models, a simply case of sine function was analyzed in their works without considering other typical external disturbances and unmodeled dynamics, hence it was difficult to demonstrate that the proposed control algorithms had good robustness and anti-interference ability. To solve the problems of rotational inertia uncertainty and external disturbance in spacecraft of electro-hydraulic position servo systems, He et al. [32] and Yu et al. [33] both studied an adaptive finite time control algorithm based on backstepping method and established a mathematical model described by quaternions. Although their method avoided the complexity, explosiveness and singular value problems by the backstepping design of theoretical calculation, the system complexity was increased owing to using neural networks to estimate unknown nonlinear functions. Gao et al. [15] and Duan et al. [16] proposed a self-disturbance rejection control algorithm for electro-hydraulic position servo systems. They achieved real-time estimation of composite disturbances by designing a linear extended state observer and improved the transient response speed of the system. Although the control accuracy of the algorithm was demonstrated to be higher compared to the PID algorithm, its control performance still needs further improvement. Wang et al. [18], Nguyen et al. [20] and Lebel et al. [21] presented an adaptive backstepping control algorithm for air suspension system with consideration of unmodeled dynamics and external disturbances. Although the algorithm could overcome the disturbance problem caused by parameter uncertainty, the established system model might induce vibration problems when the vehicle operated with relative low or high speed, making it difficult to ensure the stability of the system. Cao et al. [25] and Liu et al. [26] investigated the problem of actuator energy limitation during high-precision launch of kinetic energy loads on launch platforms. A new adaptive fuzzy output feedback controller based on dual observers was proposed by combining a sliding mode observer with a fuzzy observer with appropriate membership functions, which achieved motion control with disturbance suppression. However, the solving process often became very complex as the system order increased when solving fractional derivatives. Therefore, Xue et al. [30] and Yu et al. [31] considered an adaptive neural network backstepping control algorithm of fractional order nonlinear systems. Although the algorithm could reduce the difficulty of solving fractional order nonlinear systems, it increased the difficulty of establishing nonlinear models.
To further improve the anti-interference ability and control accuracy of the control system, an adaptive backstepping control algorithm (ABCA) is proposed in this paper for the actual working process of the extension cylinder of the bearing pressing machine. Firstly, a nonlinear mathematical model of the ESSVSC is established, which takes into account external disturbances and unmodeled dynamic factors. Secondly, based on the established mathematical model, an adaptive backstepping controller is designed by using the backstepping algorithm and the system control law and adaptive parameter estimation law are also given. The adaptive parameter estimation law is designed to effectively estimate the bounded values of the system output signal and improve the transient response speed of the system. Meanwhile, the designed adaptive backstepping controller can also enhance the robustness and anti-interference ability of the system when facing external disturbances and unmodeled dynamic factors. Finally, we analyze and verify the designed control algorithm by considering the influences of several typical external disturbances and unmodeled dynamic factors, and further compare the proposed algorithm with the traditional PID control algorithm (PID) and the backstepping sliding mode control algorithm (BSMCA). The results show that the proposed algorithm possesses strong anti-interference ability under typical external disturbances and unmodeled dynamic factors, the output displacement error value of our algorithm is smaller, the tracking performance is better, the jitter and overshoot of the system are reduced significantly.
The paper is organized as follows. The problem is described and the mathematical model of the system is established in Section 2. Section 3 designs an adaptive backstepping controller by using backstepping control algorithm. The system control law and adaptive parameter estimation law are also given in this section. Section 4 provides the proof of the system stability by constructing Lyapunov Functions. Section 5 verifies the effectiveness and superiority of the control algorithm proposed in this paper through example analysis where the influences of four typical external disturbances and unmodeled dynamic factors are investigated and performance comparison where the BSMCA and the PID are considered. Section 6 concludes the whole work.
2 Problem description and model construction
The structural diagram of the considered ESSVSC for extension sleeve press-fitting process of bearing pressing machine is shown in Figure 1. The input displacement signal is fed into the controller and acts on the electro-hydraulic servo valve through the servo amplifier. The symmetrical cylinder generates an output displacement signal under the action of the electro-hydraulic servo valve, and this signal is fed back to the controller through a position sensor. By adjusting the parameters of the controller, the deviation between the output and input displacement signals is adjusted continuously until it approaches zero infinitely.
The state variable  is defined here and the following assumption is taken.
is defined here and the following assumption is taken.
Assumption 1 [34]: The hydraulic oil in both chambers of the hydraulic cylinder has the same elastic modulus, i.e., βe1 = βe2 = βe. The effective areas of both chambers in the hydraulic cylinder are the same, i.e., A1 = A2 = A.
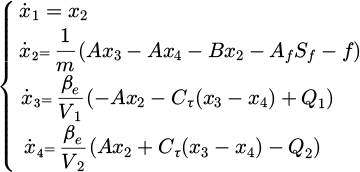
Then, according to the pressure dynamic equation of the two chambers of the valve controlled cylinder, flow equation and inertial load dynamic equation, the mathematical model of the ESSVSC of extension sleeve press-fitting process of bearing pressing machine can be derived as follows:
 (1)
(1)
where m is the load mass, xp is the output displacement, i.e., x1,  represents the output speed, i.e., x2, p1 and p2 represent the working pressures of the left and right cavities, respectively, i.e., x3 and x4 respectively, A is the effective area of the left and right cavities, B is the effective viscous damping coefficient, Af is the Coulomb friction amplitude, Sf is the shape function of the Coulomb friction, f represents the external disturbance and unmodeled dynamics, βe is the elastic modulus of the oil, V1 = V01 + Ay and V2 = V02 − Ay are the effective volumes of the two cavities respectively (V01 and V02 denote the initial volumes of the two cavities respectively), Cτ is the hydraulic cylinder leakage coefficient, Q1and Q2 represent the inlet and return oil flow rates of the hydraulic cylinder, respectively.
represents the output speed, i.e., x2, p1 and p2 represent the working pressures of the left and right cavities, respectively, i.e., x3 and x4 respectively, A is the effective area of the left and right cavities, B is the effective viscous damping coefficient, Af is the Coulomb friction amplitude, Sf is the shape function of the Coulomb friction, f represents the external disturbance and unmodeled dynamics, βe is the elastic modulus of the oil, V1 = V01 + Ay and V2 = V02 − Ay are the effective volumes of the two cavities respectively (V01 and V02 denote the initial volumes of the two cavities respectively), Cτ is the hydraulic cylinder leakage coefficient, Q1and Q2 represent the inlet and return oil flow rates of the hydraulic cylinder, respectively.
Furtherly, as in the reference [34], another assumption is introduced here to facilitate the derivation of the oil flow rate equation of the two cavities of the valve-controlled cylinder.
Assumption 2 [34]: The area gradients of the left and right ends of the throttle hole in the electro-hydraulic servo valve core is equal, i.e., ω1 = ω2 = ω.
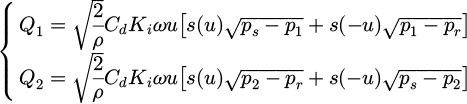
Then, the oil flow rate equation can be obtained as:
 (2)
(2)
where ρ is the hydraulic oil density, Cd represents the flow coefficient of the orifice, Ki represents the current gain of the servo valve spool, ω is the gradient of the orifice area, u is the control input signal, ps and pr represent the pressures of the pressure source and the return oil, respectively, and the function s(u) is defined as:
 (3)
(3)
By introducing following parameters:

Equation (2) can be simplified as:
 (4)
(4)
For the convenience of controller designing, we can reduce the original fourth-order model to a third-order model. If redefining the state variable x3 as load acceleration, i.e., x3 = Ap1–Ap2, and setting θ = [θ1, θ2, θ3, θ4] T = [B, Af, dn, Ct] T, then the model of the ESSVSC can be re-expressed as:
 (5)
(5)
where 
 |
Fig. 1 The structural diagram of the ESSVSC for extension sleeve press-fitting process of bearing pressing machine. |
3 Adaptive backstepping controller design
Based on the mathematical model of the ESSVSC presented above, an adaptive backstepping controller is designed here through backstepping algorithm by using Lyapunov function. The control law and adaptive parameter estimation law are also given in this section. The block diagram of the derivation process of the adaptive backstepping control algorithm (ABCA) is shown in Figure 2. The detailed derivation process is described as follows, where ki > 0(i =1, 2, 3) denote the controller parameters.
Step 1: Setting x1d as the displacement tracking value of x1, the displacement tracking error can be given as e1 = x1 −x1d. In order to make the error e1 approaching 0, the first semi-definite Lyapunov function is defined as:
 (6)
(6)
Taking the derivative of equation (6) yields  . To ensure system stability, it is necessary to satisfy
. To ensure system stability, it is necessary to satisfy  . If setting
. If setting  , then the system is stable. At this point, we have
, then the system is stable. At this point, we have  , i.e.,
, i.e., which is an intermediate virtual value and can be represented as x2d. Since x2 = x2d + e2 (x2d is the tracking value of x2), following relation can be found by differentiating equation (6):
which is an intermediate virtual value and can be represented as x2d. Since x2 = x2d + e2 (x2d is the tracking value of x2), following relation can be found by differentiating equation (6):
 (7)
(7)
Step 2: To make e2 approaching 0, it is necessary to find the second Lyapunov function, which should include e1 and e2. Only when both errors approaching 0, can the system be stable. The second Lyapunov function is introduced as:
 (8)
(8)
According to the second equation in equation (5), we have:
 (9)
(9)
By consideration of 𝑒2 = 𝑥2 − 𝑥2d and equation (9), it can be obtained that:
 (10)
(10)
Differentiating equation (8) yields:
 (11)
(11)
Substituting equation (7) into equation (11) gives:
 (12)
(12)
and substituting equation (10) into equation (12) yields:
 (13)
(13)
In equation (13), x3 is an intermediate virtual value that can be named as x3d. Set x3d as the tracking value of x3, then 𝑒3 = 𝑥3–𝑥3d. Setting  is the estimated value of adaptive parameter θ, then the error of adaptive parameter θ is
is the estimated value of adaptive parameter θ, then the error of adaptive parameter θ is  . Equation (13) can be further written as:
. Equation (13) can be further written as:
 (14)
(14)
In order to make the system stable, it is necessary to ensure  . By setting
. By setting  , we have
, we have  . Then equation (14) can be rewritten as:
. Then equation (14) can be rewritten as:
 (15)
(15)
Step 3: In order to make the error e3 approaching 0, the third Lyapunov function should be found, which must include e1, e2 and e3. Only when all three errors approach 0, can the system be stable. The third Lyapunov function is given as:
 (16)
(16)
of which the derivative can be acquired as:
 (17)
(17)
Substituting equation (8) into equation (17) yields:
 (18)
(18)
Considering  ,e3 = x3 − x3d and
,e3 = x3 − x3d and  , equation (18) can be expanded as:
, equation (18) can be expanded as:
 (19)
(19)
Similarly,  should be satisfied to meet the stability requirement of the system. Therefore, by setting
should be satisfied to meet the stability requirement of the system. Therefore, by setting  , the system control law u can be given as follows:
, the system control law u can be given as follows:
 (20)
(20)
Therefore, equation (19) can be further written as:
 (21)
(21)
Step 4: The fourth Lyapunov function which must include e1, e2, e3 and  is required in order to let the error
is required in order to let the error  approaching 0. The system remains stable only when all the four errors approach 0. The fourth Lyapunov function is constructed as:
approaching 0. The system remains stable only when all the four errors approach 0. The fourth Lyapunov function is constructed as:
 (22)
(22)
with consideration of the derivative of equation (22) and equation (21), we have:
 (23)
(23)
where  and
and  .
.
To ensure  , we can set
, we can set  and hence obtain the adaptive parameter estimation law
and hence obtain the adaptive parameter estimation law  as follows:
as follows:
 (24)
(24)
 |
Fig. 2 The block diagram of the derivation process of the proposed adaptive backstepping control algorithm of electro-hydraulic position servo system model. |
4 Proof of the system stability
To prove the stability of the system, following Lyapunov function is taken.
 (25)
(25)
Considering the derivative of equation (25) and equations (22), (23), we have
 (26)
(26)
where  ,
, , ATP + PA = − Q, and P is a real symmetric positive definite matrix.
, ATP + PA = − Q, and P is a real symmetric positive definite matrix.
According to equations (7), (15), (19) and (23), it can be acquired that:
 (27)
(27)
It can be inferred that e1, e2 and e3 are bounded because all signals in the closed-loop controller are bounded [35]. According to the lemma in reference [35], we know that the adaptive parameter estimation law  is also bounded, i.e., θ1, θ2, θ3, θ4 are bounded. Meanwhile,
is also bounded, i.e., θ1, θ2, θ3, θ4 are bounded. Meanwhile,  can be found according to equation (27), which means the system remains stable. Based on the above analysis, it can be concluded that the system control law u is related to the controller parameters k1, k2, and k3. Therefore, it is required to comprehensively investigate the system performance of transient and steady-state responses to adjust the controller parameters.
can be found according to equation (27), which means the system remains stable. Based on the above analysis, it can be concluded that the system control law u is related to the controller parameters k1, k2, and k3. Therefore, it is required to comprehensively investigate the system performance of transient and steady-state responses to adjust the controller parameters.
5 Example analyses and simulation verification
To verify the rationality of the presented model and the effectiveness of the designed control algorithm, the performances of the output displacement signals tracking the input ones of the system are analyzed through several examples here and four typical external disturbances and unmodeled dynamic factors are considered.
Given the input displacement signal as  , four typical external disturbances and unmodeled dynamic factors (f) are set as cosine function, step function, ramp function and pulse function, respectively. The analysis results of the signal tracking performance are shown in Figure 3.
, four typical external disturbances and unmodeled dynamic factors (f) are set as cosine function, step function, ramp function and pulse function, respectively. The analysis results of the signal tracking performance are shown in Figure 3.
From Figure 3, it can be seen that the maximum input displacement of the system is 2.000e–01m when t = 22.771 s. Figure 3a corresponds to the case of f = 20cos(4πt) where the maximum output displacement of the system is 1.990e–01m and the relative error of the output displacement to the input displacement is 0.5%. Figure 3b shows the case of step function where the maximum output displacement is 1.994e–01m and the relative error is 0.3%. As for the ramp function (Fig. 3c), the maximum output displacement is 2.008e-01m and the relative error is 0.4%. Additionally, there exists a noticeable overshoot phenomenon in the output displacement of the system. As for the pulse function, as shown in Figure 3d, the maximum output displacement is 1.993e-01m and the relative error is 0.35%. Apparently, all of the relative error values for these four typical cases are within the allowable range, which means that the output displacement signal of the system can still effectively track the input displacement signal with minor errors when facing the influences of four typical external disturbances and unmodeled dynamic factors, and hence the proposed control algorithm is effective.
To further verify the performance of the algorithm, the electro-hydraulic position servo system for the extension cylinder of a certain type of bearing pressing machine is taken here as a real example and the related parameters are shown in Table 1. The traditional PID algorithm and the BSMCA algorithm are considered in our comparison. The comparative analysis results are shown in Figures 4 and 5.
The controller code was compiled by using Matlab simulation software and a controller module was built in Matlab-Simulink for simulation. In the analysis, the external disturbances and unmodeled dynamics of the system were represented by f = 20sin(4πt), the coulomb friction amplitude was set as Af = 10 and the coulomb friction shape function is Sf = 2arctan(1000x2/π). Given the input displacement signal  , the simulation step size was set to 0.0002s. The tuning process and setting results of other relevant parameters are as follows.
, the simulation step size was set to 0.0002s. The tuning process and setting results of other relevant parameters are as follows.
(1) For the proposed algorithm (ABCA): The proof of system stability has been provided in Sec. 4 and will not be elaborated here. To ensure satisfactory control effects of the system, parameter k1 was adjust firstly to stabilize the system's output displacement. Then, parameter k2 was adjusted gradually until the system's output displacement is about to fluctuate. Finally, to prevent oscillation in the system's output displacement, parameter k3 was tuned by appropriately increasing its value until a slight overshoot occurs in the output displacement. To ensure the convergence, robustness, and real-time performance of the system, the adaptive parameter was also adjusted. The upper limit (θmax) and lower limit (θmin) values for the adaptive parameter were input in the Matlab compiler, and a loop statement was utilized to conduct repeated calculations and iterative optimizations, thus making that the controller may operate with optimal control parameters as much as possible. After comprehensive consideration of the transient response and corresponding steady-state performance of the system, the parameters of the controller are taken as:

(2) For the traditional PID algorithm (PID): Firstly, the system's response speed was improved by adjusting the proportional gain kp until the system output displacement reaches a stable state. Secondly, the system's static error was eliminated by adjusting the integral gain ki until the displacement error value tends to 0. Finally, the differential gain kd was gradually increased until there occurred a slight overshoot in the system output displacement which helps to improve the system's stability. It should be noted at this point that kd should not be set too high to avoid oscillation in the system output displacement. After comprehensive consideration of the transient response and corresponding steady-state performance of the system, the PID parameters are finally taken as: k𝑝 = 20, ki = 5, kd = 3.
(3) For the backstepping sliding mode control algorithm (BSMCA): The control law u′ of the BSMCA can be derived from equation (5) as: where
where ,
,  ,
,  ,
,  and θ = [θ1, θ2, θ3, θ4] T = [B, Af, f, Cτ] T. The system is stable. In the backstepping sliding mode control algorithm, the tuning of controller parameters is a critical step that directly affects the control performance and stability of the system. Multiple rounds of iterative parameter tuning were conducted through Matlab-Simulink simulation experiments. During the system parameter tuning process, the stability, tracking performance, and anti-interference capability of the system should be monitored closely. Firstly, the stability of the system output displacement, namely, the stability of the system on the sliding mode surface, should be ensured during the adjustments of parameters k1, k2, and k3. Secondly, both of the control accuracy and tracking performance of the system needed to be considered when determining each parameter value. Finally, after multiple rounds of debugging, we select more reasonable parameters to enhance the system's robustness against external disturbances. The specific adjustment process is similar to that described in the previous section, i.e., “(1) Adaptive Backstepping Control Algorithm (ABCA)”, and thus will not be repeated here. After comprehensive consideration, the parameters of the BSMCA were finally set as: k1 = 30, k2 = 100, k3 = 1000.
and θ = [θ1, θ2, θ3, θ4] T = [B, Af, f, Cτ] T. The system is stable. In the backstepping sliding mode control algorithm, the tuning of controller parameters is a critical step that directly affects the control performance and stability of the system. Multiple rounds of iterative parameter tuning were conducted through Matlab-Simulink simulation experiments. During the system parameter tuning process, the stability, tracking performance, and anti-interference capability of the system should be monitored closely. Firstly, the stability of the system output displacement, namely, the stability of the system on the sliding mode surface, should be ensured during the adjustments of parameters k1, k2, and k3. Secondly, both of the control accuracy and tracking performance of the system needed to be considered when determining each parameter value. Finally, after multiple rounds of debugging, we select more reasonable parameters to enhance the system's robustness against external disturbances. The specific adjustment process is similar to that described in the previous section, i.e., “(1) Adaptive Backstepping Control Algorithm (ABCA)”, and thus will not be repeated here. After comprehensive consideration, the parameters of the BSMCA were finally set as: k1 = 30, k2 = 100, k3 = 1000.
For the PID case, as shown in Figure 4a, the maximum approximate value of displacement error is 6.250e-02m as the system tends to stable gradually. For the BSMCA case, Figure 4b shows that the maximum approximate value of displacement error is 6.250e-02m. For our algorithm, it can be observed from Figure 4c that the maximum approximate value of displacement error is only 1.600e-04m as the system stabilizes gradually. By comparing Figure 4c with Figures 4a–4b, the error value of the output displacement under ABCA is found to be reduced by two orders of magnitude relative to the case of PID, and about 50% relative to the case of BSMCA.
From Figure 5a, it can be seen that the output displacement can effectively track the input displacement of the system. The overall effects are good under the ABCA and the BSMCA, while the PID shows jitter phenomenon. Figures 5b and 5d show a locally enlarged view of t = 19 s–19.156 s, while Figure 5c depicts a locally enlarged view of t = 22.943–22.951 s. It can be observed that the output displacement curve tends to approach the input one under the algorithm proposed in this paper, which exhibits the fastest transient response speed, the highest accuracy and the best tracking effect. Additionally, the jitter and overshoot phenomena of the system output displacement are also suppressed significantly. Relatively speaking, the effect of the BSMCA takes second place and that of the PID is the worst with slow time response, low accuracy and even overshoot phenomena.
Five performance indexes are selected and calculated here for further comparative analysis, which are the maximum, minimum, mean, standard deviation (Rms) and peak to peak values of the system displacement error. The results are listed in Table 2.
From Table 2, it can be seen that the maximum displacement errors of three algorithms are 1.688e-04m (ABCA), 3.267e-04m (BSMCA) and 6.472e-02m (PID), respectively. The displacement error value of ABCA has been reduced by 48.33% and 94.76% compared to BSMCA and PID, respectively. Meanwhile, both of the minimum displacement error (‒1.653e-04m) and the average displacement error (2.078e-07m) of ABCA are the smallest, the latter indicating that the average level of controlling displacement error is the best under ABCA. The standard deviation (Rms) of displacement error is also the smallest with a value of 6.522e-05m, reflecting the minimum degree of dispersion of displacement error under ABCA. In addition, the peak to peak value of displacement error under ABCA is 3.341e-04m which is also the best, illustrating the minimum maximum offset of the displacement error curve under the proposed algorithm. These results further demonstrate that the control algorithm designed in this paper has superiority over the PID and the BSMCA.
 |
Fig. 3 Displacement tracking performance of electro-hydraulic position servo system under four typical external disturbances and unmodeled dynamic factors: (a)–(d) corresponds to the case of cosine function, step function, ramp function, and pulse function, respectively. |
 |
Fig. 3 (Continued). |
 |
Fig. 4 Displacement error of electro-hydraulic position servo system under three control algorithms: (a)–(c) corresponds to the case of traditional PID algorithm, backstepping sliding mode control algorithm and adaptive backstepping algorithm, respectively. |
 |
Fig. 5 Output displacement tracking input displacement of electro-hydraulic position servo system under three algorithms: (a)–(d) corresponds to the case of overall diagram and partial enlarged diagrams, respectively. |
Comparative data of quantitative analysis for displacement error under three algorithms (PID, BSMCA and ABCA).
6 Conclusion
The ESSVSC for extension sleeve press-fitting process of bearing pressing machine is often affected by external disturbances and unmodeled dynamic factors in actual working process. To improve the control performance of the extension cylinder during the press-fitting process, an adaptive backstepping control algorithm (ABCA) is proposed in this paper. Firstly, a mathematical model of the ESSVSC is established which takes into account external disturbances and unmodeled dynamic factors. Secondly, the adaptive backstepping controller is designed by using the backstepping algorithm on the basis of the established model. The control law and adaptive parameter estimation law are further presented, and the stability of the control system is proved. Finally, the influences of four typical external disturbances and unmodeled dynamic factors are investigated and the results show that the output displacement signal can still effectively track the input signal of the system, verifying the rationality of the model and the effectiveness of the designed control algorithm. Furthermore, the performance superiority of the proposed ABCA is discussed by comparison with the PID and the BSMCA, where the real parameters of a certain type bearing pressing machine are considered. The results indicate that:
The designed control system has strong robustness and anti-interference ability. Under the influences of four typical external disturbances and unmodeled dynamic factors, the output displacement signal can effectively track the input signal, and the relative error is relatively small (within 5%), which verifies the effectiveness of the proposed algorithm.
The proposed algorithm has superiority over the PID and the BSMCA. The transient response speed of the system under ABCA is the fastest, the output displacement error is the smallest, the tracking performance of the output displacement signal is the best, and the jitter and overshoot phenomenon of the system output displacement can be reduced greatly. The control accuracy of the system can be enhanced by 48.33% and 94.76% compared to the BSMCA and the PID, respectively.
Funding
This work was supported by Support Project for Outstanding Young Talents in Colleges and Universities in Anhui Province (Project No. gxyq2021273) and Key Project for Natural Science Research of colleges and universities in Anhui Province (Project No. 2023AH053227).
Conflicts of interest
The author declared no potential conflicts of interest with respect to the research, authorship, and/or publication of this article.
Data availability statement
No confidential data was used for the research described in the article.
Author contribution statement
This article is a sole author, and the entire content is written by the author personally.
References
- Y. Ma et al., Research on control strategy of asymmetric electro-hydraulic servo system based on improved PSO algorithm, Adv. Mech. Eng. 14, 1–14 (2022) [Google Scholar]
- J. Na et al., Output feedback control of uncertain hydraulic servo systems, IEEE Trans. Ind. Electron. 67, 490–500 (2020) [CrossRef] [Google Scholar]
- Y. Huang et al., Approximation-free control for vehicle active suspensions with hydraulic actuator, IEEE Trans. Ind. Electron. 65, 7258–7267 (2018) [CrossRef] [Google Scholar]
- J. Shao et al., Recent advances on gait control strategies for hydraulic quadruped robot, Recent Pat. Mech. Eng. 11, 15–23 (2018) [CrossRef] [Google Scholar]
- J. Na et al., Unknown system dynamics estimator for motion control of nonlinear robotic systems, IEEE Trans. Ind. Electron. 67, 3850–3859 (2020) [CrossRef] [Google Scholar]
- D. Hou et al., Adaptive disturbance observer based backstepping control for underwater vehicle manipulator systems, J. Unmanned Undersea Syst. 31, 413–420 (2023) [Google Scholar]
- D. Huang et al., Accurate parking control for urban rail trains via robust adaptive backstepping approach, IEEE Trans. Intell. Transp. Syst. 23, 21790–21798 (2022) [CrossRef] [Google Scholar]
- S. Yousefizadeh et al., Tracking control for a DC microgrid feeding uncertain loads in more electric aircraft: adaptive backstepping approach, IEEE Trans. Ind. Electron. 66, 5644–5652 (2019) [CrossRef] [Google Scholar]
- S. Li et al., On the rejection of internal and external disturbances in a wind energy conversion system with direct-driven PMSG, ISA Trans. 61, 95–103 (2016) [CrossRef] [Google Scholar]
- M. Nguyen et al., Robust position and vibration control of an electrohydraulic series elastic manipulator against disturbance generated by a variable stiffness actuator, Mechatronics 52, 22–35 (2018) [CrossRef] [Google Scholar]
- J. LI et al., Feedback linearization sliding mode control of electrohydraulic force servo system, J. Mech. Electr. Eng. 40, 860–866 (2023) [Google Scholar]
- L. Min et al., Feedback linearized sliding mode control for electrohydraulic position servo systems, J. Qingdao Univ. (E&T) 36, 9–14 (2021) [Google Scholar]
- S. Chen et al., On the conceptualization of total disturbance and its profound implications, Sci. China Inf. Sci. 63, 221–225 (2020) [Google Scholar]
- Z. Chen et al., Overview of a novel control method: active disturbance rejection control technology and its practical applications, CAAI Trans. Intell. Syst. 13, 866–877 (2018) [Google Scholar]
- B. Gao et al., Application of the gray wolf optimization algorithm in active disturbance rejection control parameter tuning of an electro-hydraulic servo unit, Machines 10, 599–609 (2022) [CrossRef] [Google Scholar]
- Z. Duan et al., Research on servo valve-controlled hydraulic motor system based on active disturbance rejection control, Measur. Control 57, 113–123 (2023) [Google Scholar]
- M. Bahrami et al., Adaptive super-twisting observer for fault reconstruction in electro-hydraulic systems, ISA Trans. 76, 235–245 (2018) [CrossRef] [Google Scholar]
- W. Wang et al., Rail vehicle dynamic response to a nonlinear physical ‘in-service' model of its secondary suspension hydraulic dampers, Mech. Syst. Signal Process. 95, 138–157 (2017) [CrossRef] [Google Scholar]
- Y. Zhang et al., Survey of multi-model adaptive control theory and its applications, Chin. J. Eng. 429, 135–143 (2020) [Google Scholar]
- S. Nguyen et al., A new fuzzy-disturbance observer-enhanced sliding controller for vibration control of a train-car suspension with magneto-rheological dampers, Mech. Syst. Signal Process. 105, 447–466 (2018) [CrossRef] [Google Scholar]
- D. Lebel et al., Bayesian calibration of mechanical parameters of high-speed train suspensions, Proc. Eng. 199, 1234–1239 (2017) [CrossRef] [Google Scholar]
- M. Chen et al., Adaptive fuzzy practical fixed-time tracking control of nonlinear systems, IEEE Trans. Fuzzy Syst. 29, 664–673 (2021) [CrossRef] [Google Scholar]
- S. Ha et al., Command filtered adaptive fuzzy control of fractional-order nonlinear systems, Eur. J. Control. 63, 48–60 (2022) [CrossRef] [MathSciNet] [Google Scholar]
- S. Ha et al., Backstepping-based adaptive fuzzy synchronization control for a class of fractional-order chaotic systems with input saturation, Int. J. Fuzzy Syst. 21, 1571–1584 (2019) [CrossRef] [MathSciNet] [Google Scholar]
- M. Cao et al., Dual observers based adaptive fuzzy output feedback control of a motor-driven launching platform with input saturation and disturbance rejection, J. Intell. Fuzzy Syst. 45, 8663–8678 (2023) [CrossRef] [Google Scholar]
- H. Liu et al., Adaptive neural network backstepping control of fractional-order nonlinear systems with actuator faults, IEEE Trans. Neural Networks Learn. Syst. 31, 5166–5177 (2020) [CrossRef] [MathSciNet] [PubMed] [Google Scholar]
- Z. Ma et al., Adaptive fuzzy backstepping dynamic surface control of strict-feedback fractional-order uncertain nonlinear systems, IEEE Trans. Fuzzy Syst. 28, 122–133 (2020) [CrossRef] [Google Scholar]
- H. Qiu et al., Composite adaptive fuzzy backstepping control of uncertain fractional-order nonlinear systems with quantized input, Int. J. Mach. Learn. Cybern. 14, 833–847 (2022) [Google Scholar]
- H. Liu et al., Composite learning adaptive sliding mode control of fractional-order nonlinear systems with actuator faults, J. Franklin Inst. Eng. Appl. Math. 356, 9580–9599 (2019) [CrossRef] [Google Scholar]
- G. Xue et al., Adaptive fuzzy finite-time backstepping control of fractional-order nonlinear systems with actuator faults via command-filtering and sliding mode technique, Inf. Sci. 600, 189–208 (2022) [CrossRef] [Google Scholar]
- J. Yu et al., Command-filtered adaptive neural network backstepping quantized control for fractional-order nonlinear systems with asymmetric actuator dead-zone via disturbance observer, Nonlinear Dyn. 111, 6449–6467 (2022) [Google Scholar]
- X. He et al., Adaptive finite-time backstepping control for spacecrafts, J. Zhejiang Univ. Technol. 48, 13–19 (2020) [Google Scholar]
- J. Yu et al., Finite-time command filtered backstepping control for a class of nonlinear systems, Automatica 92, 173–180 (2018) [CrossRef] [Google Scholar]
- J. Yao et al., High dynamic feedback linearization control of hydraulic actuators with backstepping, Proc. Inst. Mech. Eng. Part 1 229, 728–737 (2015) [CrossRef] [Google Scholar]
- B. Yao et al., Indirect adaptive robust control of hydraulic manipulators with accurate parameter estimates, IEEE Trans. Control Syst. Technol. 19, 567–575 (2011) [CrossRef] [Google Scholar]
- A. Mohanty, Indirect adaptive robust control of hydraulic manipulators with accurate parameter estimates, IEEE Trans. Control Syst. Technol. 19, 567–575 (2011) [CrossRef] [Google Scholar]
Cite this article as: H. Chen, Adaptive backstepping control for electro-hydraulic servo system in extension sleeve press-fitting process of bearing pressing machine, 26, 3 (2025), https://doi.org/10.1051/meca/2024038
All Tables
Comparative data of quantitative analysis for displacement error under three algorithms (PID, BSMCA and ABCA).
All Figures
|
Fig. 1 The structural diagram of the ESSVSC for extension sleeve press-fitting process of bearing pressing machine. |
| In the text | |
|
Fig. 2 The block diagram of the derivation process of the proposed adaptive backstepping control algorithm of electro-hydraulic position servo system model. |
| In the text | |
|
Fig. 3 Displacement tracking performance of electro-hydraulic position servo system under four typical external disturbances and unmodeled dynamic factors: (a)–(d) corresponds to the case of cosine function, step function, ramp function, and pulse function, respectively. |
| In the text | |
|
Fig. 3 (Continued). |
| In the text | |
|
Fig. 4 Displacement error of electro-hydraulic position servo system under three control algorithms: (a)–(c) corresponds to the case of traditional PID algorithm, backstepping sliding mode control algorithm and adaptive backstepping algorithm, respectively. |
| In the text | |
|
Fig. 5 Output displacement tracking input displacement of electro-hydraulic position servo system under three algorithms: (a)–(d) corresponds to the case of overall diagram and partial enlarged diagrams, respectively. |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.